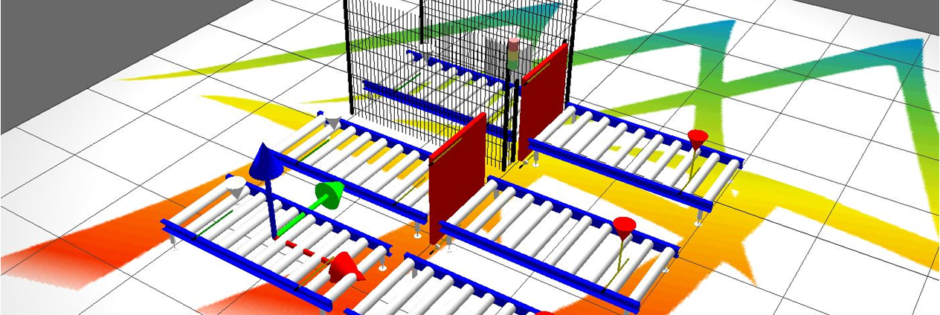
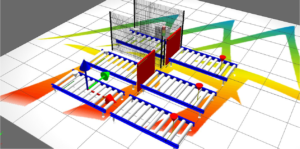
En esta entrada explicaremos como realizar un proyecto con cintas transportadoras, puerta automatizada y semáforo de señalización.
- Funcionamiento
- Esta escena simula la automatización de dos citas transportadoras con una puerta y un semáforo de señalización.El sistema dispone de:
- 5 entradas (Inputs). Los nombres de estas entradas deberán trasladarse al servidor OPCUA3D y al PLC exactamente igual o no lo entenderán.
-

-
- 7 Salidas (Outputs). Los nombres de estas salidas deberán trasladarse al servidor OPCUA y al PLC exactamente igual o no lo entenderán.
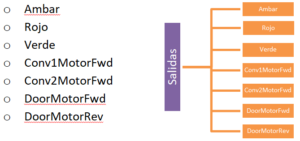
- 7 Salidas (Outputs). Los nombres de estas salidas deberán trasladarse al servidor OPCUA y al PLC exactamente igual o no lo entenderán.
La secuencia de funcionamiento es la siguiente:

- Cae el pallet accionando un pulsador (PalletButton).
- Se activa la primera cinta transportadora (conveyor1), cuando el Sensor1 lo detecta.
- El pallet avanza hasta el Sensor2, se para y se sube la puerta hasta que el SensorOpen la detecta.
- Se activan las dos cintas transportadoras hasta que el pallet llega al Sensor3.
- Las cintas se paran, la puerta se baja, el pallet desaparece y se para todo.
- Las luces del semáforo estarán en rojo con la puerta cerrada, en ámbar con la puerta en movimiento y en verde con la puerta abierta.
2. Añadir dispositivos y elementos en el Simumatik3D
Abrimos un nuevo proyecto en simumatik3D, de inicio nos aparece un proyecto, un suelo y un almacén de productos.
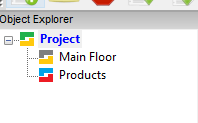
Este sería el escenario de partida. A partir de aquí iremos añadiendo los componentes que necesitemos desde la librería de objetos (Object Library).

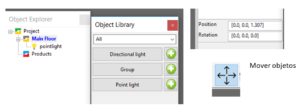
Lo primero que haremos sera añadir un grupo y una luz ambiental (Ligth source).Para lo cual, abriremos la librería de objetos, seleccionaremos All en la librería y en la pestaña pointlight pulsamos en el plus. Esta lámpara la podremos situar donde nos convenga. Todos los movimientos de los objetos se podran realizar modificando los valores en el cuadro de posicion o con la herramienta para mover objetos.
A continuación, añadiremos un grupo de objetos (Group). Para lo cual marcamos el Main Floor, clicamos sobre el plus de la pestaña Group y le ponemos de nombre control. En este grupo estara toda la parte correspondiente a el cuadro electrico: contactores, panel HMI, PLC y alimentacion electrica.
Con el grupo Control seleccionado añadimos un Electric cabinet, llamándolo Main Cabinet. Añadimos dos Motorcontactors y un motorreversingcontactor, llamándolos Conv1Contactor, Conv2Contactor y DoorContactor respectivamente. También añadiremos un HMI Panel, un PLC y AC Source.
Con el HMI panel seleccionado añadimos un HMI Buton.
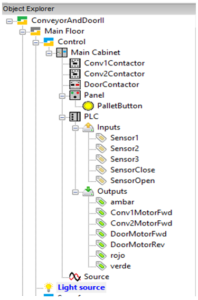
Con el PLC seleccionado añadiremos las entradas y las salidas del autómata programable. Primero Inputs y Outpust group y dentro de estos las variables de entrada y de salida. Facilita mucho clonar los elementos que se repitan en el sistema, pulsando el botón derecho del ratón nos da la opción de clonarlo. El grupo de control nos tiene que quedar como en la imagen. Los nombres de los objetos nos los ordenara alfabéticamente.

El siguiente paso sera añadir otro grupo para el semaforo en que pondremos tres lamparas (HMI Beacon), que llamaremos, Verde, Ambar y Roja. Les pondremos la primera letra en mayusculas para que el Simumatik las acepte, ya que no deja nombrar a dos elementos con el mismo nombre. Es conveniente ir colocando los elementos en la posicion deseada, ya que luego resulta mas trabajoso. Tambien se puede cambiar el color de las lamparas y modificar la altura, pasando de 0,2 que biene por defecto a 0,1.
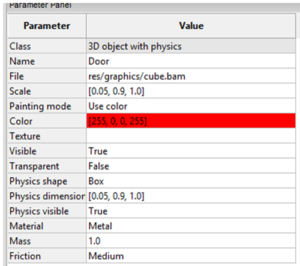
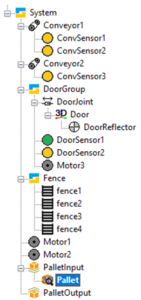
A continuacion añadiremos los elementos que necesitemos, en este caso el sistema. Con main Floor seleccionado añadiremos otro Group al que le llamaremos System. Dentro de este sistema pondremos dos cintas trasportadoras con sus respectivos sensores. Un grupo para las vallas de proteccion y otro grupo para la puerta, mas los dispositivos que nos lanzara y nos recogera los pallets de la cinta trasportadora. Para ello dentro de System añadiremos un conveyor al que llamaremos conveyor1 y dentro de este un sensor al que llamaremos ConvSensor1, este sensor lo clonaremos pulsando sobre el con el boton derecho del raton y nos lo nombrara con ConvSensor2. Clonamos en conveyor 1, nos lo nombra como conveyor 2 y borramos el ConvSensor 4. Todos los elementos deberemos moverlos a donde nos interes, bien por coordenadas o con las herramientas especificas del programa. Dentro de System añadimos otro grupo para todo lo relacionado con la puerta, le llamaremos DoorGroup. En este grupo añadiremos un Electric translation joint, llamandole DoorJoint. En el añadimos un 3D object whit physics, que llamaremos Door. A este objeto le tendremos que modificar los parametros y en file importar un cubo. Para ello pulsamos sobre el value del parametro File y seleccionamos cube.bam. Le modificamos la escala, en este caso [0.05 , 0.9 , 1.0]. Quedando la configuracion del objeto como la que muestra la figura siguiente.
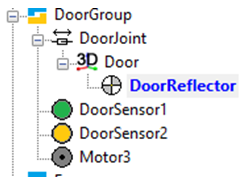
Posteriormente añadiremos un reflector a la puerta, nombrándolo como DoorReflector. En DoorGroup añadiremos dos sensores y un motor. El DoorGroup deberá quedar como el de la figura.
Añadimos un group llamado fence con cuatro vallas de protección (fences) dentro, llamándolas fence 1,2,3 y 4. A las Fences 3 y 4 les cambiaremos el tamaño a [0.2, 1.0, 0.0].Por último un product input dentro de este un product 3Dmodel Pattern y en file seleccionamos pallets, mas un product output .Debería quedar como en la figura.
3. Conexionado de los elementos en el SIMUMATIK3D
- Conv1Contactor
- In voltaje —— acsource.Output
- Input ——– Conv1MotorFwd.Value
- Conv2Contactor
- In voltaje —– acsource.Output
- Input —– Conv2MotorFwd.Value
- DoorContactor
- In voltaje —–acsource.Output
- Input Fwd —–DoorMotorFwd.Value
- Input Rev —–DoorMotorRev.Value
- PLC Inputs
- Sensor1 —–ConvSensor1.Signal
- Sensor2 —-ConvSensor1.Signal
- Sensor3 —— ConvSensor1.Signal
- SensorOpen —-DoorSensor1.Signal
- SensorClose —–DoorSensor2.Signal
- Semaforo
- Ambar —- ambar
- Roja —-rojo
- Verde —–verde
- Conveyor1
- Motor Input ——- Motor1
- Conveyor2
- Motor Input —— Motor2
- Door Joint
- Motor Input ——– Motor3
- Motor3
- Input —— Out Voltage
- Motor1
- Input ——- Conveyor1.Conv.Motor Input
- Motor2
- Input ——–Conveyor2.Conv.Motor Input
- PalletInput
- Drop signal ——- Output
- PalletOnput
- Erase signal ——- None
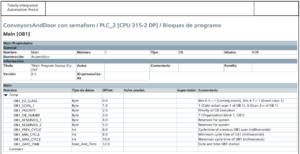
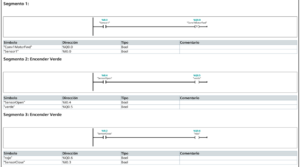
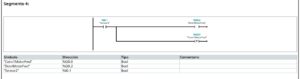
4. Programa en TIA portal

5. Variables Simumatik OPC UA server

Vídeo demostración del proyecto: